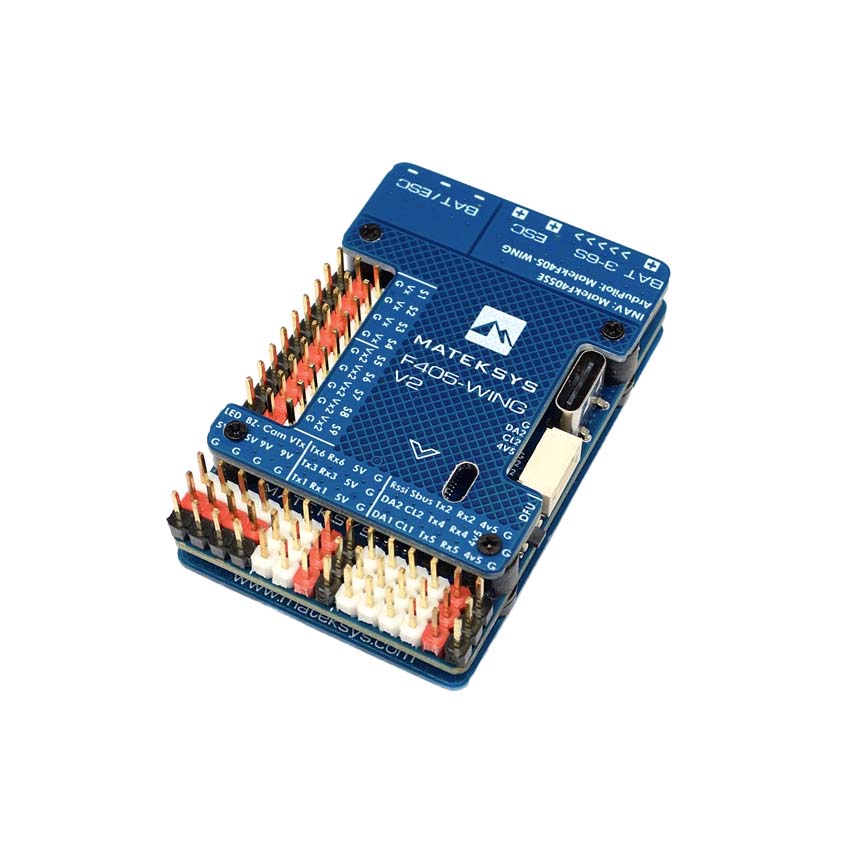
Description Whats new in V2? USB now Type-C IMU ICM42688P from MPU6000 Baro DPS310 from BMP280 Current sensor now 100A continuous 220A Peak! Up from 60A continuous, 104A Peak FC Specifications MCU: STM32F405RGT6, 168MHz , 1MB Flash IMU: ICM42688-P Baro: DPS310 OSD: AT7456E Blackbox: MicroSD card slot 6x UARTs, 1x Softserial_Tx option(INAV) 10x PWM outputs 2x I2C 3x ADC (VBAT, Current, RSSI) Built in inverter for SBUS input USB Type-C(USB2.0) FC Firmware ArduPilot: MatekF405-Wing (ArduPlane 4.4 or newer) INAV: MATEKF405SE (INAV 6.0 or newer) PDB Input voltage range: 9~30V (3~6S LiPo) w/TVS protection Current Senor: 220A, 3.3V ADC (INAV scale 150, ArduPilot 66.7A/V) Sense resistor: 100A continuous, 220A peak Battery Voltage divider 1K:10K (Scale 1100 in INAV, BATT_VOLT_MULT 11.0 in ArduPilot) BEC 5V output Designed for Flight controller, Receiver, OSD, Camera, Buzzer, 2812 LED_Strip, Buzzer, GPS module, AirSpeed Continuous current: 2 Amps BEC 9V /12V output Designed for Video Transmitter, Camera, Gimbal ect. Continuous current: 2 Amps 12V option with Jumper pad for stable 9V/12V output, input voltage should > output voltage 1V BEC Vx output Designed for Servos Voltage adjustable, 5V Default, 6V or 7.2V options Continuous current: 5 Amps, 6A Peak for stable Vx output, input voltage should > Vx voltage 1V BEC 3.3V output Designed for external 3.3V peripherals Linear Regulator Continuous current: 200mA Physical Mounting: 30.5 x 30.5mm, Φ4mm with Grommets Φ3mm Dimensions: 54 x 36 x 13 mm Weight: 25g Including 1x F405-Wing-V2 1x 20cm JST-GH-4P to JST-GH-4P cable for I2C port Dupont 2.54 pins (Board is shipped unsoldered) Tips INAV firmware “MATEKF405SE” must be 6.0.0 or newer version. Current sensor scale 150 5x Vx2 pads on S5~S9 rails are dead pins, If powering servos of S5~S9 rails with the built-in Vx BEC, bridge Vx2 to Vx pad with a drop of tin. If powering servos of S5~S9 rails with an external BEC, keep the gap open, you may connect external BEC to any pair of Vx2/G. Softserial_tx1 is enabled on Tx2 pad by default for Frsky SmartPort telemetry. If using CRSF protocol receiver(TBS, ELRS etc), CPU based serial port(softserial) should be disable in INAV configurator. GPS / DJI OSD and other digital video systems / CRSF protocol receiver can work with anyyyyyyy spare UART_TX & RX. Airspeed sensor MS4525 works on I2C2 bus only. iNav mapping: http://www.mateksys.com/?portfolio=f405-wing-v2#tab-id-4 ArduPilot mapping: http://www.mateksys.com/?portfolio=f405-wing-v2#tab-id-5